Hídvezérlés. Megnevezés a rádióalkatrészek diagramjain
Ebben a cikkben megvizsgáljuk a rádióelemek jelölését az ábrákon.
Hol kezdjem a diagramok olvasását?
Az áramkörök olvasásának megtanulásához először is meg kell vizsgálnunk, hogyan néz ki egy adott rádióelem az áramkörben. Ebben elvileg nincs semmi bonyolult. A lényeg az, hogy ha az orosz ábécé 33 betűből áll, akkor a rádióelemek szimbólumainak megtanulásához keményen kell próbálkoznia.
Eddig az egész világ nem tudott megegyezni abban, hogyan jelöljék ki ezt vagy azt a rádióelemet vagy eszközt. Ezért tartsa ezt szem előtt, amikor burzsoá sémákat gyűjt. Cikkünkben megvizsgáljuk a rádióelemek kijelölésének orosz GOST-változatát
Egy egyszerű áramkör tanulmányozása
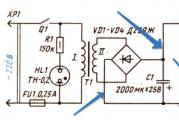
Oké, térjünk a lényegre. Nézzük meg a tápegység egyszerű elektromos áramkörét, amely korábban bármely szovjet papírkiadványban megjelent:
Ha nem ez az első nap, amikor forrasztópákát tart a kezében, akkor első pillantásra minden azonnal világos lesz. De olvasóim között vannak olyanok is, akik először találkoznak ilyen rajzokkal. Ezért ez a cikk elsősorban nekik szól.
Nos, elemezzük.
Alapvetően minden diagramot balról jobbra olvasunk, akárcsak egy könyvet. Bármilyen különböző áramkör ábrázolható külön blokkként, amelyhez táplálunk valamit, és ahonnan eltávolítunk valamit. Itt van egy tápegység áramköre, amelyre 220 V-ot adunk az Ön házának aljzatából, és állandó feszültség jön ki a készülékünkből. Vagyis meg kell értened mi az áramkör fő funkciója?. Ezt a leírásban olvashatod.
Hogyan kapcsolódnak a rádióelemek egy áramkörbe?
Úgy tűnik tehát, hogy eldöntöttük ennek a rendszernek a feladatát. Az egyenes vonalak olyan vezetékek vagy nyomtatott vezetők, amelyeken keresztül elektromos áram folyik. Feladatuk a rádióelemek összekapcsolása.

Azt a pontot, ahol három vagy több vezető csatlakozik, nevezzük csomó. Azt mondhatjuk, hogy itt forrasztják a vezetékeket:

Ha alaposan megnézi a diagramot, láthatja két vezető metszéspontját

Az ilyen metszéspontok gyakran megjelennek az ábrákon. Emlékezz egyszer s mindenkorra: ezen a ponton a vezetékek nincsenek csatlakoztatva, és el kell szigetelni őket egymástól. A modern áramkörökben leggyakrabban ez az opció látható, amely már vizuálisan mutatja, hogy nincs kapcsolat közöttük:

Itt olyan, mintha az egyik vezeték felülről megkerülné a másikat, és semmilyen módon nem érintkeznek egymással.
Ha lenne kapcsolat közöttük, akkor ezt a képet látnánk:

Az áramkörben lévő rádióelemek betűjeles jelölése
Nézzük meg még egyszer a diagramunkat.
Amint látható, a diagram néhány furcsa ikonból áll. Nézzük meg az egyiket. Legyen ez az R2 ikon.

Tehát először foglalkozzunk a feliratokkal. R azt jelenti. Mivel nem ő az egyetlen a sémában, ennek a sémának a kidolgozója a 2-es sorozatszámot adta neki. Az ábrán 7 darab van belőlük. A rádióelemeket általában balról jobbra és fentről lefelé számozzák. Egy vonallal ellátott téglalap már egyértelműen mutatja, hogy ez egy állandó ellenállás, amelynek disszipációs teljesítménye 0,25 Watt. Azt is írja mellette, hogy 10K, ami azt jelenti, hogy a címlete 10 Kilohm. Hát valami ilyesmi...
Hogyan jelölik a fennmaradó radioelemeket?
A rádióelemek jelölésére egy- és többbetűs kódokat használnak. Az egybetűs kódok csoport, amelyhez ez vagy az az elem tartozik. Itt vannak a főbbek radioelemek csoportjai:
A – ezek különböző eszközök (például erősítők)
BAN BEN – nem elektromos mennyiségek átalakítói elektromossá és fordítva. Ez magában foglalhat különféle mikrofonokat, piezoelektromos elemeket, hangszórókat stb. Generátorok és tápegységek itt ne alkalmazza.
VAL VEL – kondenzátorok
D – integrált áramkörök és különféle modulok
E – vegyes elemek, amelyek nem tartoznak egyetlen csoportba sem
F – levezetők, biztosítékok, védőberendezések
H – jelző- és jelzőberendezések, például hang- és fényjelző eszközök
K – relék és indítók
L – induktorok és fojtótekercsek
M – motorok
R – műszerek és mérőeszközök
K – kapcsolók és szakaszolók az áramkörökben. Vagyis olyan áramkörökben, ahol nagy feszültség és nagy áram "jár"
R - ellenállások
S – kapcsolóberendezések a vezérlő-, jelző- és mérőáramkörökben
T – transzformátorok és autotranszformátorok
U – elektromos mennyiségek elektromoská alakítói, kommunikációs eszközök
V – félvezető eszközök
W – mikrohullámú vezetékek és elemek, antennák
x – érintkező csatlakozások
Y – elektromágneses meghajtású mechanikus eszközök
Z – végberendezések, szűrők, határolók
Az elem pontosítása érdekében az egybetűs kód után van egy második betű, ami már jelzi elem típusa. Az alábbiakban felsoroljuk az elemek fő típusait a betűcsoporttal együtt:
BD – ionizáló sugárzás detektor
LENNI – selsyn vevő
B.L. – fotocella
BQ – piezoelektromos elem
BR - sebességmérő
B.S. - felvenni
B.V. - sebességmérő
B.A. – hangszóró
BB – magnetostrikciós elem
B.K. - hőérzékelő
B.M. – mikrofon
B.P. - nyomásmérő
IDŐSZÁMÍTÁSUNK ELŐTT. – Selsyn érzékelő
D.A. – integrált analóg áramkör
DD – integrált digitális áramkör, logikai elem
D.S. – információtároló eszköz
D.T. – késleltető készülék
EL - világító lámpa
E.K. - fűtőelem
F.A. – pillanatnyi áramvédő elem
FP – tehetetlenségi áramvédő elem
F.U. - biztosíték
F.V. – feszültségvédő elem
G.B. - akkumulátor
HG – szimbolikus jelző
H.L. – fényjelző berendezés
HA. – hangjelző berendezés
KV – feszültségrelé
K.A. – áramrelé
KK – elektrotermikus relé
K.M. - mágneses kapcsoló
KT – időrelé
PC – pulzusszámláló
PF – frekvenciamérő
P.I. – aktív energia mérő
PR - ohmmérő
PS - felvevő eszköz
PV – voltmérő
PW - wattmérő
PA – ampermérő
PK – meddő energia mérő
P.T. - néz
QF
QS – szakaszoló
RK – termisztor
R.P. – potenciométer
R.S. – mérősönt
RU – varisztor
S.A. – kapcsoló vagy kapcsoló
S.B. – nyomógombos kapcsoló
SF - Automata kapcsoló
S.K. – hőmérséklet-vezérelt kapcsolók
SL – szint szerint aktivált kapcsolók
SP – nyomáskapcsolók
S.Q. – pozíció szerint aktivált kapcsolók
S.R. – forgási sebességgel aktivált kapcsolók
tévé – feszültség transzformátor
T.A. - áramváltó
UB – modulátor
UI – diszkriminátor
UR – demodulátor
UZ – frekvenciaváltó, inverter, frekvenciagenerátor, egyenirányító
VD – dióda, zener dióda
VL – elektrovákuum készülék
VS – tirisztor
VT –
W.A. – antenna
W.T. – fázisváltó
W.U. – csillapító
XA – áramgyűjtő, csúszóérintkező
XP – tű
XS - fészek
XT – összecsukható csatlakozás
XW – nagyfrekvenciás csatlakozó
YA – elektromágnes
YB – fék elektromágneses meghajtással
YC – elektromágneses meghajtású tengelykapcsoló
YH - elektromágneses lemez
ZQ - kvarcszűrő
Az áramkörben lévő rádióelemek grafikus jelölése
Megpróbálom megadni a diagramokon használt elemek leggyakoribb megnevezését:
Ellenállások és típusaik

A) általános megjelölés
b) disszipációs teljesítmény 0,125 W
V) disszipációs teljesítmény 0,25 W
G) disszipációs teljesítmény 0,5 W
d) disszipációs teljesítmény 1 W
e) disszipációs teljesítmény 2 W
és) disszipációs teljesítmény 5 W
h) disszipációs teljesítmény 10 W
És) disszipációs teljesítmény 50 W
Változó ellenállások

Termisztorok

Nyújtásmérők

Varisztorok

Shunt

Kondenzátorok

a) a kondenzátor általános megnevezése
b) variconde
V) polárkondenzátor
G) trimmer kondenzátor
d) változó kondenzátor
Akusztika

a) fejhallgató
b) hangszóró (hangszóró)
V) a mikrofon általános megnevezése
G) elektret mikrofon
Diódák

A) diódahíd
b) a dióda általános megnevezése
V) zener dióda
G) kétoldalas zener dióda
d) kétirányú dióda
e) Schottky dióda
és) alagútdióda
h) fordított dióda
És) varikap
Nak nek) Fénykibocsátó dióda
l) fotodióda
m) kibocsátó dióda az optocsatolóban
n) sugárzásfogadó dióda az optocsatolóban
Elektromos mennyiségmérők

A) ampermérő
b) voltmérő
V) voltammérő
G) ohmmérő
d) frekvenciamérő
e) wattmérő
és) faradométer
h) oszcilloszkóp
Induktorok

A) mag nélküli tekercs
b) induktor maggal
V) hangoló induktor
Transzformátorok

A) transzformátor általános megnevezése
b) transzformátor tekercs kimenettel
V) áramváltó
G) transzformátor két szekunder tekercssel (talán több)
d) háromfázisú transzformátor
Kapcsolóeszközök

A) zárás
b) Nyítás
V) nyitás visszatérővel (gomb)
G) zárás visszatéréssel (gomb)
d) váltás
e) reed kapcsoló
Elektromágneses relé különböző érintkezőcsoportokkal

Megszakítók

A) általános megjelölés
b) ki van jelölve az az oldal, amely feszültség alatt marad, amikor a biztosíték kiolvad
V) inerciális
G) gyorsan ható
d) hőtekercs
e) szakaszolókapcsoló biztosítékkal
Tirisztorok

Bipoláris tranzisztor

Unijunction tranzisztor

Szinte minden robotnak van motorja. Egyes robotoknál ezek hajtják a kerekeket, aminek hatására az autó a kívánt irányba mozog. Más esetekben a hajtóművek légcsavarokat pörgetnek, így függőleges tolóerőt hoznak létre a repüléshez. A motorok lehetővé teszik egy ipari robotkar csuklóinak forgatását és mozgatását egy 3D nyomtató kocsijának. Általában véve nem lehet robotot készíteni jó motor nélkül. Sokféle motor létezik. A robotikában a leggyakoribbak az egyenáramú motor, a léptetőmotor és a kefe nélküli motor. Mindegyik típusnak megvannak a maga sajátosságai, előnyei és hátrányai. Egyesek alkalmasabbak a precíz mozgásra, míg mások megkönnyítik a multikopterek égbe emelését. Minden projekthez gondosan ki kell választania a megfelelő motortípust. Ebben a leckében megvizsgáljuk, hogyan kell vezérelni egy egyenáramú motort. Az ilyen típusú alkatrészeket a robotokban használják kerekes és lánctalpas platformokon. És kezdjük a legegyszerűbb ellenőrzési módszerrel.
1. Tranzisztor
Minden kezdő robotista szembesül azzal a problémával, hogy egy motort mikrokontrollerhez csatlakoztat. Miután átment, úgy tűnik, hogy ugyanezt megteheti a motorral: csatlakoztassa a digitális érintkezőkhöz Arduino, majd a programnak megfelelően kapcsolja be és ki. De nem volt ott. Még egy kis motor is, amelyet gyakran használnak különféle típusú játékokban, 200 mA és 1 Amper közötti áramot igényel. Az Arduino digitális kimenete pedig csak 20mA-t tud nekünk adni. A legtöbb erős motorhoz az Arduino által megszokott 5 V-nál nagyobb feszültségre van szükség. Gyakoriak a 12, 24 és 48 voltos motorok. Más szóval, az Arduino nagyon gyenge a motorok közvetlen vezérléséhez. Valami erős közvetítőre van szükségünk! A legegyszerűbb közvetítő a tranzisztor. Mind a térhatású tranzisztorok, mind a kapcsoló üzemmódban működő bipoláris tranzisztorok alkalmasak. Az alábbiakban egy bipoláris NPN tranzisztort használó motorvezérlő áramkör látható.2. H-híd
A tranzisztorok meghatározott módon történő összeállításával a motor mindkét irányú forgásának szabályozására szolgáló eszközt kapunk. Az ilyen készüléket ún H-híd. Így néz ki a H-híd bipoláris tranzisztoron: Az ábrán az INA és az INB a gyenge vezérlőjelek bemenete. Arduino esetében 0 (földelés) vagy +5 V-tal kell ellátni őket. A VCC a motorok tápellátása, és többszöröse lehet a vezérlőjel feszültségének. A GND az Arduino és a H-híd közös alapja. Attól függően, hogy melyik bemenetre adunk pozitív jelet, a motor egyik vagy másik irányba forog. Általában a H-hídon kívül védődiódákat, szűrőket, optocsatolókat és egyéb fejlesztéseket is hozzáadnak az egyenáramú motor meghajtó áramköréhez.
Az ábrán az INA és az INB a gyenge vezérlőjelek bemenete. Arduino esetében 0 (földelés) vagy +5 V-tal kell ellátni őket. A VCC a motorok tápellátása, és többszöröse lehet a vezérlőjel feszültségének. A GND az Arduino és a H-híd közös alapja. Attól függően, hogy melyik bemenetre adunk pozitív jelet, a motor egyik vagy másik irányba forog. Általában a H-hídon kívül védődiódákat, szűrőket, optocsatolókat és egyéb fejlesztéseket is hozzáadnak az egyenáramú motor meghajtó áramköréhez. 3. Driver chip L293D
Természetesen nem szükséges a motormeghajtót kézzel összeszerelni az egyes tranzisztorokból. Számos kész mikroáramkör létezik, amelyek lehetővé teszik a különböző típusú motorok vezérlését. Megfontoljuk a közös illesztőprogram L293D. A mikroáramkör két H-hídból áll, ami azt jelenti, hogy egyszerre két motort vezérelhet. Minden híd négy védődiódával és túlmelegedés elleni védelemmel van felszerelve. A maximális áram, amelyet az L293D átvihet a motorra, 1,2 A. Üzemi áram - 600mA. Maximális feszültség - 36 V.
A mikroáramkör két H-hídból áll, ami azt jelenti, hogy egyszerre két motort vezérelhet. Minden híd négy védődiódával és túlmelegedés elleni védelemmel van felszerelve. A maximális áram, amelyet az L293D átvihet a motorra, 1,2 A. Üzemi áram - 600mA. Maximális feszültség - 36 V. 4. Csatlakozás
Az L293D chip DIP-csomaggal rendelkezik, 16 tűvel. A kivezetési diagram lent látható. Ne feledje, hogy a csapokat az óramutató járásával ellentétes irányba számolja, és a mikroáramkör testében lévő mélyedésből indul ki.
Ne feledje, hogy a csapokat az óramutató járásával ellentétes irányba számolja, és a mikroáramkör testében lévő mélyedésből indul ki. - +V — mikroáramköri tápegység, 5V;
- +Vmotor - tápegység motorokhoz, 36V-ig;
- 0V - földelés;
- En1, En2 — terminálok a H-hidak be- és kikapcsolásához;
- In1, In2 - az első H-híd vezérlőcsapjai;
- Out1, Out2 - kapcsok az első motor csatlakoztatásához;
- In3, In4 - a második H-híd vezérlőkapcsai;
- Out3, Out4 - terminálok a második motor csatlakoztatásához.
| Driver L293D | 1 | 2 | In3 | In4 | En1 | En2 | V+ | Vmotor+ | 0V |
| Arduino Uno | 7 | 8 | 2 | 3 | 6 | 5 | +5V | +5V | GND |
 Elrendezés megjelenése
Elrendezés megjelenése

5. Program
Írjunk egy egyszerű programot, amely másodpercenként forgatja a motort. const int in3 = 2; const int in4 = 3; const int en2 = 5; void setup() ( pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); analógWrite(en2, 255); ) void loop() ( digitalWrite(in3, LOW); digitalWrite(in4, HIGH); késleltetés (1000); digitalWrite (in3, HIGH); digitalWrite (in4, LOW); késleltetés (1000); ) Funkció analogWrite PWM jel segítségével szabályozza a motor teljesítményét. Ebben a programban azt a parancsot adjuk a vezetőnek, hogy a motort maximális fordulatszámon forgassa, ami 255-ös PWM jelnek felel meg. Itt meg kell jegyezni, hogy a PWM jel felére csökkentése nem ad fele sebességet. Az egyenáramú motorok fordulatszáma és tolóereje nemlineárisan függ a bemeneti feszültségtől. Most bonyolítsuk le a programot. Az irány mellett az erőt is változtatjuk. const int in3 = 2; const int in4 = 3; const int en2 = 5; void setup() ( pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); ) void loop() ( digitalWrite(in3, HIGH); digitalWrite(in4, LOW); analógWrite(en2, 150); késleltetés (2000); analógWrite (en2, 255); késleltetés (2000); digitalWrite (in3, LOW); digitalWrite (in4, HIGH); analógWrite (en2, 150); késleltetés (2000); analógWrite (en2, 255); delay(2000); ) Ez fog történni a végén. A motor először alacsony fordulatszámon forog, majd eléri a maximális sebességet, és mindent megismétel az ellenkező irányba. A videóban kerékkel pörgetjük a közös CH1 DC motort. Ezeket gyakran használják oktatási robotokban.Feladatok
Most, hogy egy kicsit világosabbá vált a hagyományos egyenáramú motorok vezérlése, próbáljunk meg több feladatot is végrehajtani a legegyszerűbb kétkerekű robot alapján.- Szereljen össze egy meghajtót egy NPN tranzisztorra, és használja a motor forgatásához.
- Vezéreljen egyszerre két motort az L293D segítségével, különböző teljesítményt adva át nekik.
- Állíts össze egy kerekes robotot, és mozgasd körben.
- Mozogjon egy kerekes robotot spirálban.
A motorok vezérlésére úgynevezett H-hidakat használnak, amelyek a bemenetekre vezérlő logikai jelek ellátásával mindkét irányú forgást lehetővé teszik. Ebben a cikkben összegyűjtöttem a H-hidak több lehetőségét. Mindegyiknek megvannak a maga előnyei és hátrányai, a választás az Öné.
1.OPCIÓEz egy tranzisztoros H-híd, méltósága a gyártás egyszerűsége, szinte mindenkinek van hozzá alkatrésze a kukában, ráadásul elég erős is, főleg ha KT816 és KT817 tranzisztorokat használunk a diagramon feltüntetett KT814, KT815 helyett. . A Log.1 nem szállítható ennek a hídnak mindkét bemenetére, mert rövidzárlat lép fel.
2. LEHETŐSÉG
Ez a H-híd mikroáramkörre van összerakva, előnye, hogy egy mikroáramkör :-), és az is, hogy már 2 H-híd van benne. A hátrányok közé tartozik, hogy a mikroáramkör alacsony fogyasztású - max. kimeneti áram 600 mA. Az E vonalon PWM jelet lehet adni a fordulatszám szabályozására; ha ez nem szükséges, akkor az E érintkezőt a pozitív tápfeszültségre kell csatlakoztatni.
3. LEHETŐSÉG
Ez a vezérlési lehetőség is chipen van, erősebb, mint az L293D, de csak egy hídja van. A mikroáramkör három S, P és F változatban kapható. Az ábrán az S opció látható. A P opció erősebb, az F opció pedig felületre szerelhető. Minden mikroáramkörnek különböző kivezetései vannak, a többit lásd az adatlapon. Ez az áramkör egyébként lehetővé teszi, hogy mindkét bemenetre egységeket alkalmazzon, ez motorfékezést okoz.
4. LEHETŐSÉG
Ez a híd MOSFET tranzisztorokkal van összeszerelve, nagyon egyszerű és meglehetősen erős. Két egység nem adható rá egyszerre.
Még mindig elég sok motorvezérlő chip létezik (például TLE4205, L298D), de a fent említettek a legnépszerűbbek. A H-hidat hagyományos elektromágneses relék segítségével is összeállíthatja.
Különféle elektronikus áramkörökben gyakran szükséges a terhelésre adott feszültség polaritásának megváltoztatása működés közben. Az ilyen eszközök áramkörét kulcselemek segítségével valósítják meg. A kulcsok készülhetnek kapcsolókon, elektromágneses reléken vagy félvezető eszközökön. A tranzisztoron lévő H-híd lehetővé teszi a vezérlőjelek segítségével a működtetőelemre táplált feszültség polaritásának átkapcsolását.
Különféle elektronikus játékok, egyes háztartási készülékek és robotika szálcsiszolt egyenáramú motorokat, valamint bipoláris léptetőmotorokat használnak. Gyakran egy algoritmus végrehajtásához gyorsan meg kell változtatni a tápfeszültség polaritását elektromos jel segítségével, hogy egy műszaki eszköz motorja az ellenkező irányba forogjon. Így a robotporszívó a falnak ütközve azonnal hátramenetbe kapcsol, és hátramenetben elhajt az akadálytól. Ezt a módot egy H-híd segítségével valósítják meg. A H-híd áramkör lehetővé teszi az elektromos motor forgási sebességének megváltoztatását is. Ehhez egy impulzusszélesség-modulátor (PWM) impulzusait továbbítják a két kapcsoló egyikéhez.
A motor üzemmód vezérlő áramköre egy h-híd. Ez egy egyszerű elektronikus áramkör, amely a következő elemek felhasználásával készíthető:
- Bipoláris tranzisztorok
- Mezőhatás tranzisztorok
- Integrált áramkörök
Az áramkör fő eleme egy elektronikus kulcs. A híd sematikus ábrája a latin „H” betűhöz hasonlít, innen ered az eszköz neve. Az áramkör 4 párban elhelyezett kulcsot tartalmaz, bal és jobb oldalt, és ezek közé terhelés kapcsolódik.

A diagram azt mutatja, hogy a kapcsolókat párban és átlósan kell bekapcsolni. Amikor az 1-es és 4-es gomb be van kapcsolva, az elektromos motor az óramutató járásával megegyező irányban forog. A 2. és 3. gomb biztosítja, hogy a motor ellenkező irányban működjön. Ha két kulcsot függőlegesen balra vagy jobbra kapcsolunk, rövidzárlat lép fel. Mindegyik pár vízszintesen rövidre zárja a motor tekercsét, és nem fordul elő forgás. Az alábbi ábra szemlélteti, mi történik, ha megváltoztatjuk a kapcsolók helyzetét:

Ha az áramkörben lévő kapcsolókat tranzisztorokra cseréljük, ezt a (rendkívül leegyszerűsített) változatot kapjuk:

Az esetleges rövidzárlat kiküszöbölése érdekében a tranzisztorokon lévő h-híd bemeneti logikával van kiegészítve, amely kiküszöböli a rövidzárlat előfordulását. A modern elektronikai eszközökben a polaritásváltó hídáramköröket olyan eszközökkel egészítik ki, amelyek egyenletes és lassú fékezést biztosítanak a fordított üzemmódba váltás előtt.
H-híd bipoláris tranzisztorokon
A kulcsáramkörök tranzisztorai a szelepek elvén működnek „nyitott-zárt” módban, így a nagy teljesítmény nem disszipálódik a kollektorokon, és a használt tranzisztorok típusát elsősorban a tápfeszültség határozza meg. Egy egyszerű, bipoláris tranzisztorokat használó h-híd külön-külön is összeállítható különböző vezetőképességű szilícium félvezető eszközökkel.
 H-híd bipoláris tranzisztorokon
H-híd bipoláris tranzisztorokon Ez az eszköz lehetővé teszi egy kis teljesítményű egyenáramú motor vezérlését. Ha A indexű KT816 és KT817 tranzisztorokat használ, akkor a tápfeszültség nem haladhatja meg a 25 V-ot. A hasonló B vagy D indexű tranzisztorok 45 V feszültségig és 3 A-t meg nem haladó áramerősséggel működnek. Az áramkör megfelelő működéséhez , radiátorokra tranzisztorokat kell szerelni . A diódák megvédik az erős tranzisztorokat a fordított áramtól. Védődiódaként használhatja a KD105-öt vagy bármely más megfelelő áramerősségre tervezett diódát.
Ennek a sémának az a hátránya, hogy nem lehet nagy potenciált alkalmazni mindkét bemenetre, mivel mindkét kapcsoló egyidejű nyitása rövidzárlatot okoz a tápegységben. Ennek kiküszöbölésére az integrált hídáramkörök olyan bemeneti logikát biztosítanak, amely teljesen kiküszöböli a bemeneti jelek helytelen kombinációját.

A hídáramkört erősebb tranzisztorok elhelyezésével lehet változtatni.
N-híd a térhatású tranzisztorokon
Amellett, hogy bipoláris tranzisztorokat használnak a híd energiagazdálkodási áramköreiben, térhatású tranzisztorok (MOSFET) is használhatók. A félvezető elemek kiválasztásakor az impulzusszélesség-moduláció alkalmazásakor általában figyelembe veszik a feszültséget, a terhelési áramot és a kapcsolók kapcsolási frekvenciáját. Amikor egy térhatású tranzisztor kapcsolási módban működik, csak két állapota van - nyitott és zárt. Amikor a kulcs nyitva van, a csatorna ellenállása elhanyagolható, és egy nagyon kis értékű ellenállásnak felel meg. A kulcsáramkörök térhatású tranzisztorainak kiválasztásakor figyelni kell erre a paraméterre. Minél nagyobb ez az érték, annál több energia vész el a tranzisztorban. Minimális csatornaellenállás mellett a híd hatásfoka nagyobb, hőmérsékleti jellemzői jobbak.
További negatív tényező a csatorna ellenállásának a hőmérséklettől való függése. A hőmérséklet növekedésével ez a paraméter észrevehetően növekszik, ezért erős térhatású tranzisztorok használatakor megfelelő radiátorokat vagy aktív hűtőköröket kell biztosítani. Mivel a térhatású tranzisztorok kiválasztása egy hídhoz bizonyos nehézségekkel jár, sokkal jobb integrált szerelvényeket használni. Mindegyik két teljesítmény MOSFET tranzisztorból álló komplementer párt tartalmaz, az egyik P csatornás, a másik pedig N csatornás. A tok belsejében csillapító diódák is vannak a tranzisztorok védelmére.

A tervezés során a következő elemeket használják:
- VT 1.2 – IRF7307
- DD 1 – CD4093
- R 1=R 2= 100 kom
Integrált áramkörök H-híddal
A H-híd kapcsolókban kívánatos különböző vezetőképességű, de azonos jellemzőkkel rendelkező, komplementer tranzisztorpárok alkalmazása. Ennek a feltételnek teljes mértékben megfelelnek az egy, két vagy több h-hidat tartalmazó integrált áramkörök. Az ilyen eszközöket széles körben használják az elektronikus játékokban és a robotikában. Az egyik legegyszerűbb és legolcsóbb mikroáramkör az L293D. Két h-hidat tartalmaz, amelyek két villanymotor vezérlését teszik lehetővé, és PWM vezérlővel vezérelhető. A mikroáramkör a következő jellemzőkkel rendelkezik:
- Teljesítmény - +5V
- Villanymotor tápfeszültség – + 4,5-36 V
- Kimeneti névleges áram - 500 mA
- Impulzusáram - 1,2 A
Az L298 chip két h-hidat is tartalmaz, de sokkal nagyobb teljesítménnyel. A motor maximális tápfeszültsége elérheti a +46 V-ot, a maximális áramerősség pedig 4,0 A-nak felel meg. A TB6612FNG H-híd lehetővé teszi két kefés motor vagy egy léptetőmotor csatlakoztatását. A kapcsolók MOSFET tranzisztorokon készülnek, és túlmelegedés, túlfeszültség és rövidzárlat elleni védelemmel rendelkeznek. A névleges üzemi áram 1,2 A, a maximális csúcsáram 3,2 A. A maximális impulzusszélesség modulációs frekvencia nem haladhatja meg a 100 kHz-et.
Az áthidalt motorvezérlő eszközöket gyakran meghajtóknak nevezik. A meghajtókat mikroáramköröknek is nevezik, amelyek csak az erőteljes kulcskaszkádok vezérlését biztosítják. Így a HIP4082 meghajtót egy erős elektromos motor vezérlőáramkörében használják. Ez biztosítja a különálló elemekre összeállított kulcsok kezelését. IRF1405 MOSFET tranzisztorokat használnak N-csatornával. A Texas Instruments nagyszámú integrált meghajtót gyárt, amelyek különféle kivitelű villanymotorok vezérlésére szolgálnak. Ezek tartalmazzák:
- Meghajtók léptetőmotorokhoz – DRV8832, DRV8812, DRV8711
- Meghajtók kommutátoros motorokhoz – DRV8816, DRV8848, DRV8412/32
- Meghajtók kefe nélküli motorokhoz – DRV10963, DRV11873, DRV8332
Az integrált hídáramkörök széles választéka található a piacon bármely villanymotor vezérlésére. Maga is elkészítheti a dizájnt kiváló minőségű diszkrét elemek felhasználásával.
Szinte minden robotnak nevezhető eszköz különböző típusú motorokat használ, és általában ezek többsége egyenáramú motor. Az egyenáramú motorok egyik fontos jellemzője az ellenkező irányú forgás képessége. Ennek eléréséhez egy H-hidat használnak.
Egyenáramú motoroknál a forgásirány megváltoztatásához elegendő a táp polaritását megváltoztatni, vagyis a pluszt mínuszra cserélni. Emiatt az áram az ellenkező irányba kezd folyni, ami a motor belsejében a mágneses fluxus megváltozásához vezet, aminek következtében a motor tengelye az ellenkező irányba forog. Az alábbi animáció bemutatja a H-híd működését:
 H-híd motorvezérlés
H-híd motorvezérlés
Könnyen belátható, hogy az áram irányának változtatása a motor forgásirányának megváltozásához vezet. E kapcsolók helyett tranzisztorokkal szerelhet össze H-hidat, és mikrokontrollerrel vezérelheti azokat.

A nagy teljesítményű motorok esetében a H-híd általában MOSFET tranzisztorokra épül. Valamikor az ilyen H-hidak nagyon népszerűek voltak gazdasági okokból, mivel a tranzisztorok olcsóbbak, mint egy chip. Gyakran megtalálhatók a pénztárcabarát távirányítós játékautókban.
A speciális H-híd mikroáramkörök azonban évek óta a piacon vannak. Idővel olcsóbbá válnak, és több funkcióval és biztonsággal rendelkeznek. Az egyik ilyen egyszerű chip az L293D.

Ez egy egyszerű motormeghajtó, amely két H-hidat tartalmaz, és képes a motort PWM segítségével vezérelni.

L293D illesztőprogram tű-kiosztások:
- 1,2 EN, 3,4 EN – a PWM jel vezérlésére szolgál.
- 1A, 2A, 3A, 4A – bemenet az elektromos motor forgásirányának szabályozására.
- 1Y, 2Y, 3Y, 4Y – a motort tápláló kimenetek.
- Vcc1 – vezérlő logikai tápegység érintkezője +5V
- Vcc2 – érintkező +4,5 V és +36 V közötti motorok táplálására.
Az L293D vezérlése az alábbi táblázatban látható:

Ha az A és EN bemeneten magas a szint, akkor az azonos számú kimenet is magas lesz. Ha az A bemenet alacsony, az EN pedig magas, a kimenet alacsony lesz. Ha alacsony szintű jelet adunk az EN-hez, a kimenet nagy impedanciájú lesz, függetlenül attól, hogy milyen jel van az A bemeneten.
Így tudjuk szabályozni az áram mozgásának irányát, aminek következtében lehetőségünk van a villanymotor forgásirányának megváltoztatására.
L293D műszaki adatok:
- Tápfeszültség: +5V.
- Motor tápfeszültség: +4,5 V-tól +36 V-ig.
- Kimeneti áram: 600mA.
- Maximális kimeneti áram (impulzusonként) 1,2A.
- Üzemi hőmérséklet 0°C és 70°C között.
Egy másik népszerű chip az L298. Lényegesen erősebb, mint a korábban leírt L293D. Az L298 chip két H-hidat is tartalmaz, és támogatja a PWM-et is.

Az L298 tűkiosztása nagyon hasonló az L293D-hez. Két vezérlő bemenet is található, az EN bemenetek és a motor kimenetek. A Vss az IC tápegysége, a Vs pedig a motorok tápegysége.

Van egy különbség is, mégpedig a CURRENT SENSING tűk, amelyek a motorok áramfelvételének mérésére szolgálnak. Ezeket a tüskéket egy kis, körülbelül 0,5 Ohm-os ellenálláson keresztül kell a táptesthez csatlakoztatni.
Az alábbiakban az L298 csatlakozási rajza látható:

Ebben az áramkörben érdemes odafigyelni a motorkapcsokhoz csatlakoztatott külső diódákra. Arra szolgálnak, hogy eltávolítsák a fékezés és a forgásirány megváltoztatása során fellépő indukciós túlfeszültségeket a motorban. Ezek hiánya károsíthatja a mikroáramkört. Az L293D meghajtóban ezek a diódák már magában a chipben is megtalálhatók.
L298 Műszaki adatok:
- Tápfeszültség: +5V.
- Motor tápfeszültség: +46V-ig.
- A motorok által fogyasztott maximális áram: 4A.
A következő H-bridge chip ez a TB6612, egy új, nagyon jó tulajdonságokkal rendelkező meghajtó, amely egyre népszerűbb.

Észreveheti, hogy ezek a motorvezérlők ugyanazok a vezérlésben, de a TB6612-ben a kimenetek párosítva vannak a nagy teljesítmény miatt.
A TB6612 maximális tápfeszültsége 15V, maximális áramerőssége 1,2A, ugyanakkor a maximális impulzusáram 3,2A.